- 보딩브릿지로 항공기 탑승 직전 조종석 창문 밑에 관이 몇개 보인다. 피토관, TAT probe, Alpha vane이다.
- 모두 instrument probe로 분류한다. probe에 파이프란 뜻이 있기도 하고 구글에 이미지 검색을 해보니 얇은 파이프가 많이 뜬다. 항공기 역시 외부에 돌출된 얇은 관을 이용해 대기 성분을 측정하여 계기에 표출시킨다. 그래서 instrument probe란 말을 붙이지 않았을까 추측해본다.
플토 유저라 왼쪽 상단 스타크래프트가 시선강탈
- 세 개의 장치 모두 전기로 열을 만들어 착빙을 방지(Thermal electric anti-icing)한다. 높은 전류가 흐르므로 소형 구성품에만 적용할 수 있다.
- 참고로 조종석 창문(윈드실드) 역시 전기열로 방빙. 시간이 지날수록 수분침투로 인해 전기 결함 가능성이 높으므로 주기적인 점검을 해야한다고 한다.
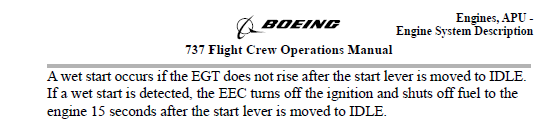
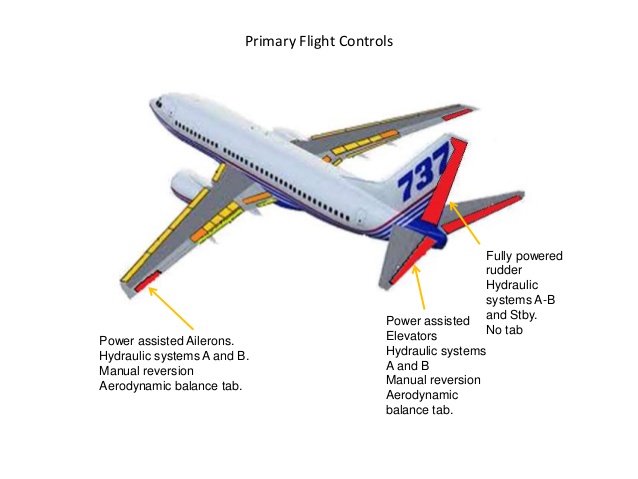
737 FCOM 발췌
자세히 관 방향을 보면 1, 2번은 앞으로 3번은 뒤로 향한다
1. 피토관(Pitot probe)
- 피토라는 프랑스인 이름에서 따옴.
- 피토관을 통해 주변 대기압 + 맞바람이 만든 압력(전압, total pressure)을 계산한다.
* static port
- 737 동체 중앙에 매립되어있다. 주변 대기압(정압, static pressure) 측정용이며 항공기 자세나 측풍으로 인한 오류를 막기 위해 양쪽에 모두 설치되어 있다.
- static port 주변은 공기의 흐름을 방해하는 페인트칠이나 기체 표면 작업 등을 할 수 없다. 그래서 빨간표시 해놓음.
probe가 아닌 port라 별표로 분리 ㅎㅎ
- 이렇게 피토관으로 구한 전압에서 static port를 통해 얻은 정압을 빼면 맞바람을 구할 수 있다. 이 맞바람 값으로항공기의 속도를 계산하게 된다. 더 자세한 원리는 문송이라 죄송ㅎ
- 이 두 파트가 고장나거나 두 파트의 방빙장치에 문제가 생기면 속도를 알 수 없으니 운항에 제약이 생긴다. Icing condtion이 있는지 없는지 확인해야하고 심하면 계기비행/야간비행이 불가능하다.
- 에어프랑스 447편 추락 사고는 피토관이 순간적으로 얼어 속도계가 고장나 오토파일럿이 꺼진것에서 시작되었다고 한다.
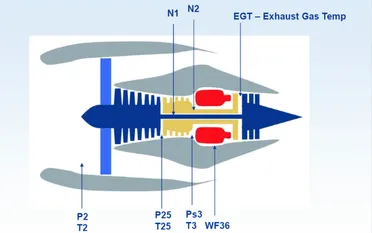
- 항공기가 빠른 속도로 비행하면 주변 공기가 비행기와 충돌하며 압력과 온도가 높아진다. 이를 램효과라고 부르며 이로 인해 계기가 인지하는 온도는 주변 온도보다 필연적으로 높을 수 밖에 없다.
- TAT가 추력 설정이나 방빙 시스템 운용의 기준이 되므로 항상 계기에서 확인할 수 있다.
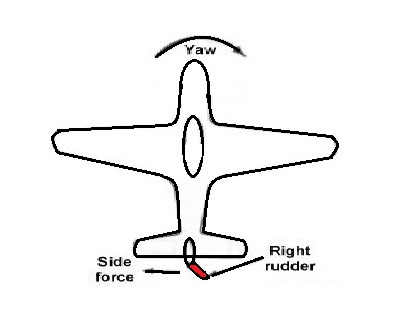
3. Alpha vane
- Alpha는 받음각 AoA의 앞글자를 딴 것으로 보이고, vane의 뜻은 풍향계이다. 대충 받음각 측정장비라는 뜻?
- 좌우 총 2개 설치. 고장나면 icing condition에서 운항이 불가능하므로 기상을 확인해야 한다.
* elevator pitot
수직미익 양쪽에 하나씩 장착
- 737에 elevator feel system이 있다. 수직미익에 설치된 피토관을 통해 얻은 항공기 속도와 스테빌라이저의 위치를 바탕으로 엘레베이터에 가해지는 공기역학적 힘을 측정한다. 그리고 이를 요크에 전달하여 조종사가 그 힘을 느낄 수 있게끔 한다.
- 조종 경험 없이 글로만 정리한거라 잘 와닿지는 않는다. 내용을 찾아보다가 수직꼬리날개에도 피토관이 달려있다는 걸 알게 되어 참고로 추가했다.
* 정리
Instrument probe를 통해 측정한 정보는 대부분 ADIRS로 향한다. 그만큼 항공기 운항에 가장 중요한 역할을 하고 있다. MEL을 봐도 대부분 CREW DEFER가 불가능하다. 일단 다시 돌아와서 확실하게 점검하고 가라고 엄격한 규정을 만든 것만 봐도 그 중요성을 확인할 수 있다.
- PBN(Performance Based Navigation)을 보통 성능기반항법이라고 영문 그대로 해석한다. 영단어를 그대로 해석하면 이해하기 어려운 경우가 있는데 PBN도 마찬가지다. (항공기 자체)성능기반항법이라고 하면 의미가 좀 더 선명해진다. 말 그대로 항공기에게 요구되는 GPS 수신기, FMS 및 각종 계기(성능) 바탕의(기반) 비행(항법)을 뜻한다.
- PBN에 속하는게 RNAV와 RNP이다. 전공수업부터 실무까지 이 GPS 기반 항법 내용이 정말 많이 등장한다. 현대 항공기 항법의 집대성같은 분야이니 그럴만도 하다. 어렴풋이 알고있던 터라 이 기회를 빌어 나름대로 정리해본다.
시험기간엔 이 내용만 달달 외우곤 했다.
- 우선 RNAV, RNP와 GPS(혹은 GNSS)의 관계를 확실히 이해할 필요가 있다. RNAV와 RNP는 하나의 비슷한 개념! 그리고 이 둘은 GPS 항법! 여태 이렇게만 생각했다. 틀린 말은 아니지만 약간 부족하다.
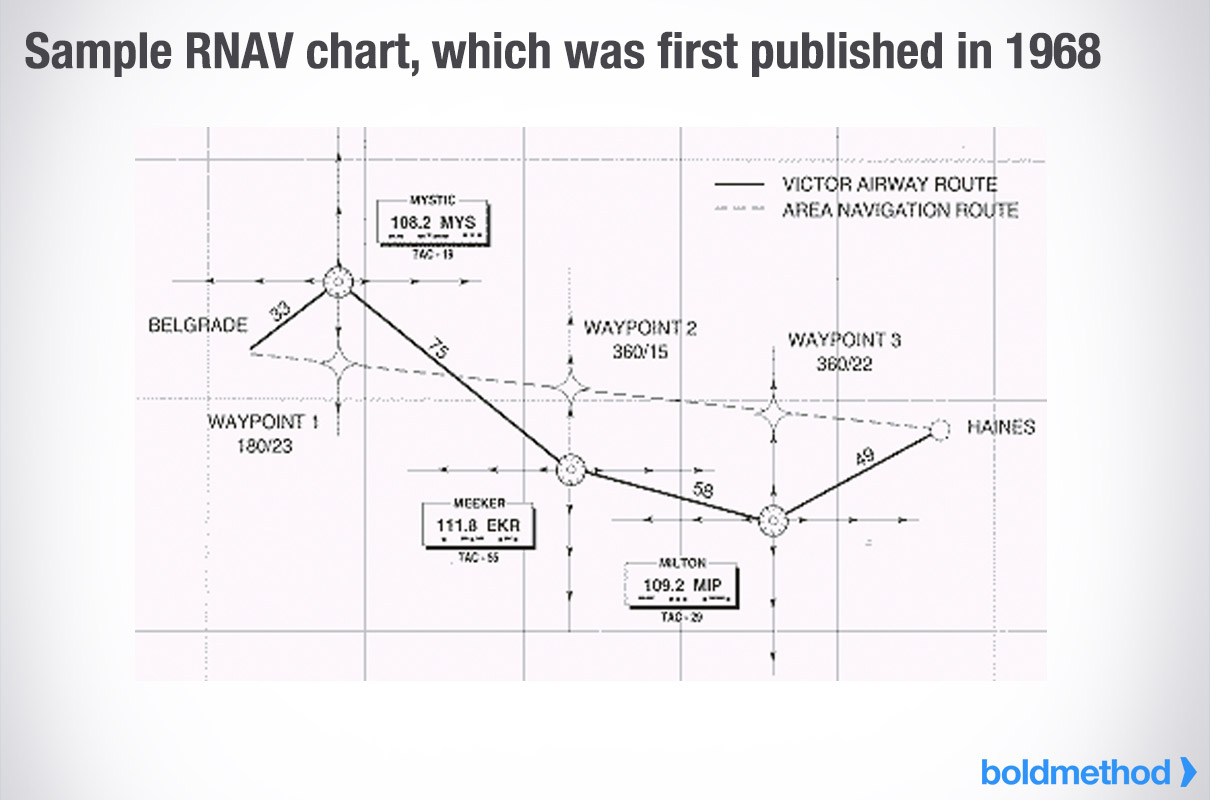
- 지상시설에만 의존하여 비행을 하다가 60년대 들어 천조국 형님들이 처음으로 RNAV를 만드셨다. 초기 RNAV는 지상항법시설 의존도가 높았다고 한다.
- 지상시설을 바탕으로 RNAV 항로를 만들었기 때문에 조종사들이 VOR과 DME 등의 주파수를 계속 맞추고 다녔다. 현재 몇 DME 떨어져있고 몇 래디얼인지 계속 확인 하는식. 예전 차트를 보면 RNAV인지 재래식 항법인지 헷갈린다.
주변 지상시설에 지나치게 의존하는 치명적인 단점. 오늘날 RNAV와 비교하면 민망하다.
초기 RNAV 항로를 다닐 때 탑재한 CLC-60이라는 컴퓨터. VOR과 DME 정보를 수집하기 위한 용도였다.
- 하지만 GPS가 민간에 개방되면서 지상시설 의존도가 매우 낮아졌다. 항공기가 GPS로부터 위치 정보를 수신받고, IRS를 토대로 움직임을 스스로 감시하며 지역항법을 수행하기 때문이다.
- 현 RNAV에선 지상장비를 보조 및 백업 역할로 사용한다. RNAV 차트에 'GNSS or DME/DME/IRU required' 문구가 있는데 초기 RNAV의 흔적이라 한다. (RNAV 하려면 최신기술인 GNSS 이용하든 구식 장비인 DME와 IRU 달든지 해라!)
그래서 DME/DME/IRU같은게 적혀있었구나,,,
- 결론적으로 GPS는 RNAV를 구현하기 위한 하나의 구성요소. 따라서 RNAV=GPS는 틀림. 다만 GPS의 존재감이 엄청 강하긴 함.
- RNAV(GPS), RNAV(GNSS)처럼 표기때문에 혼돈이 많다. 같은 개념인데 표기법만 다른거라고 한다. 전자는 초기에 미국에서 쓰던 용어이고 요즘엔 후자가 일반적이다. 사실 GNSS가 미국의 GPS, 러시아의 글로나스, 유럽의 갈릴레오를 모두 포함하는 더 넓은 개념이다. 근데 천조국의 영향력이 워낙 세다보니 GPS가 GNSS의 대명사가 되어버린듯.
- 예전에는 항행시설을 향하거나 거기서 나오는 직선 전파를 따라 항로를 만들었다. 반면 RNAV는 항행시설의 유효 범위(area) 안에서 직선, 곡선, 원호 등 다양한 방식으로 항로를 구성한다. 'area' navigation이란 이름이 붙은 이유.
- 지상설비 설치와 관리 비용이 비싸다보니 후진국이나 환경이 빡센 산악 지형 공항에서 RNAV 접근을 활용하는 경우가 많다. 필리핀 세부엔 아예 RNAV와 VOR 접근이 전부다. 중국에도 RNAV 접근절차가 많다고 한다.
- 이렇게 GPS와 FMS의 발전에 힘입어 더 정교한 RNAV가 가능해졌다. 항로 구성에만 사용하던걸 계기접근절차와 STAR, SID에도 쓰기 시작한다. 인루트에는 RNAV-10, 터미널 차트에서는 RNAV-5, 2, 1 등을 요구한다. 숫자가 작을수록 더 정밀한 항법이다.
- 인공위성을 활용한 방법에도 단점이 있다. 멀리서 쏴지는 전파가 대기층을 통과하면서 오차가 생기기도 하고, 잘못된 위치정보를 제공하기도 한다. 그래서 오류를 식별하고 오차를 보정할 수 있는 시스템이 필요하다.
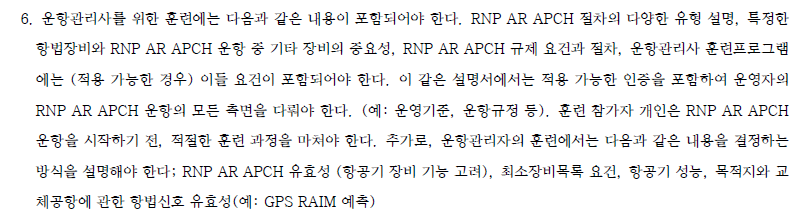
- GPS 수신기의 RAIM(Reciever Autonomous Integrity Monitoring) 기능이 그 예이다. GPS 위성신호를 감시하여 GPS가 제공하는 위치 정보가 정확한지 판단하고 문제가 있다면 조종사에게 통보하는 시스템이다. ILS 등의 지상시설을 이용하는 접근과는 무관하다. 하지만 RNP, RNP AR같이 GPS가 중요한 역할을 하는 접근시에는 RAIM 관련 노탐을 주시해야한다. RAIM의 신뢰도에 문제가 있는 상황이라면 다른 항법을 사용해야한다.
수신기 자체 무결성 감시(Receiver autonomous integrity monitoring : RAIM)"라 함은 항공기 GNSS 신호수신 처리장치가 GPS 신호만을 이용하거나, 또는 탑재된 기압고도계로 보정한 GPS 신호만을 이용하여 GNSS 항행신호의 무결성을 측정하는 ABAS의 한 형태이다. 위성항행신호의 무결성은 다중의 의사거리(pseudo-range)를 측정하는 동안 일관성을 측정하여 결정된다. RAIM 기능이 탑재된 수신기는 정확한 위치측정을 위해 최소 한 개의 위성이 추가로 필요하다. (PBN 운용지침 발췌)
이런 노탐 뜨면 GPS 이용 항법은 사용 불가
- RNAV, RNP 항법의 근간인 GPS 신호를 보정하기 위한 방법으로 ABAS(Aircraft Based Augmentation System), SBAS(Satellite Based Augmentation System), GBAS(Ground Based Augmentation System) 등이 있다. 일부 공항에는 GBAS를 활용한 GLS 접근 절차가 있는데 CAT1만큼 정확도를 구현한다고 한다. 기술이 정말 엄청난게 진보하는 듯 하다. 이 내용은 따로 정리해봐야겠다.
- RNAV 접근은 GPS가 방향 정보만 제공하기 때문에(LNAV) 비정밀접근으로 분류한다. 하지만 기압고도계의 도움을 받아 Baro-VNAV를 할 수 있다. 신뢰할 수 있는 고도정보이지만 조언에 불과하기 때문에 APV라고 부른다.(Approach Procedure with Vertical guidance, 유사정밀접근절차) baro-vnav 사용 가능한 온도가 아니라면 자동으로 lnav 접근을 하게된다.
APP를 3가지로 분류
- RNAV에 OPMA를 추가하면 RNP가 된다. RNP가 RNAV보다 진보한 기술이라고 오해하기 쉬운데 상황에 따라 뭘 쓸지 구분하면 될 것 같다. 예를 들어 레이더를 통해 관제사의 감시가 가능한 SID나 STAR는 RNAV로도 충분하고, 산악 지형이나 해상에서 인루트 단계라면 레이더 범위에 한계가 있으니 RNP를 활용하면 된다.
OPMA 예시
RNP AR
- 요즘엔 RNP AR(Authorization Required)까지 발전했다. 항공기와 운항승무원이 허가를 받고 좀 더 정밀하게, 좀 더 낮게 내려가보자! 필요하다면 곡선 구간도 만들어서!! 라는 마인드.
VMMC의 RNP-AR APP. 덕택에 직진입이 가능해졌다.
- RNP AR은 LNAV/VNAV 최저치 적용이 필수이다.
- 활주로 방향마다 최저치 차이가 큰 곳이 있다. RNP AR을 통해 이 간극을 줄여 안전성과 정시성을 높인다.
- 기대 효과가 큰만큼 PBN AR을 사용하려면 더 다양한 장비를 갖춰야한다. RNAV와 RNP는 오토파일럿과 FMCS computer가 한 개여도 괜찮지만 PBN AR은 반드시 두 개가 있어야 하는 식.
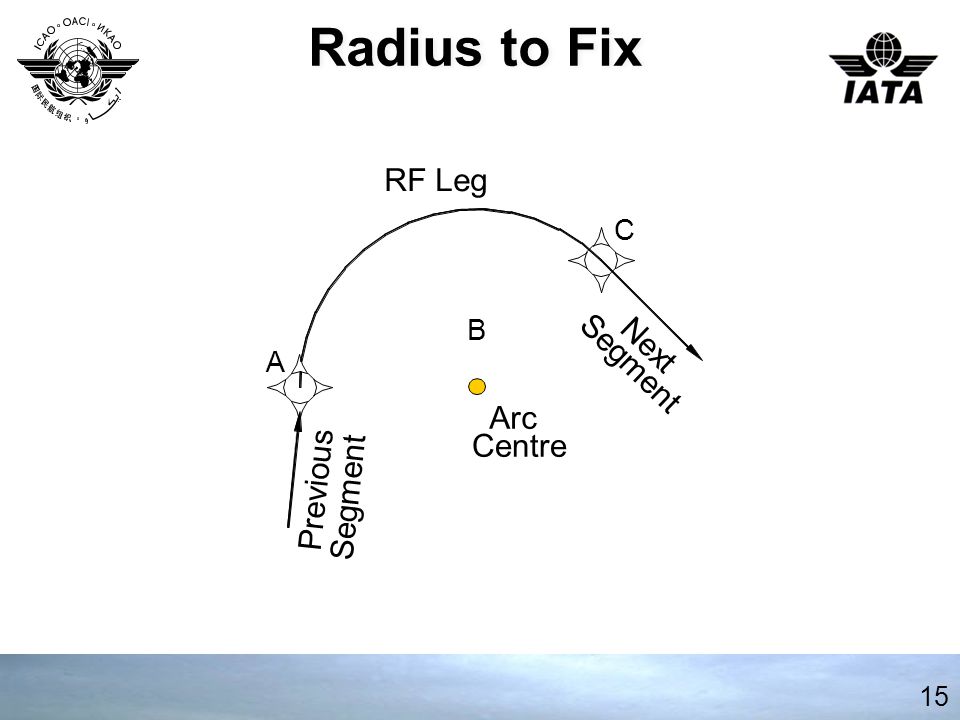
- RNP AR은 RF(Radius to Fix)를 활용하여 곡선 항로를 만들기도 한다.
ㄷㄷ
GPS 접근절차
- 회사 옵스펙을 보니 GPS app가 가능하다고 나와있다. RNAV app, RNP app와는 별개이다.
- GPS approaches are legacy approaches designed by the FAA when GPS was still fairly new.
GPS절차를 만드는 두 가지 방법
1. GPS overlay approach - NDB, VOR 등의 지상항행시설 기반 절차는 해당 시설이 고장나면 사용할 수 없다. 하지만 GPS에 그 시설의 위치나 좌표 정보가 담겨있다면 GPS를 이용하여 마치 해당 NDB, VOR 절차를 수행하듯 비행할 수 있다. GPS 항법을 기존 재래식 절차에 덧씌웠다(overlay)고 해서 GPS overlay라는 이름을 얻은 듯 하다.
VOR이 고장나면 overlay해둔 GPS접근 가능. 절차 명칭의 'or'이 특징.
2. GPS stand-alone approach - stand-alone은 '혼자 서있다', 말 그대로 '독립적인'이란 뜻이다. 그래서 GPS만 이용하는 접근 절차이다. 세스나같은 항공기에 달려있는 그 구식 GPS를 의미하는 것 같다. 당연히 여객기에 달려있는 FMS 수준의 성능은 아닐테니 RNAV, RNP같은 정밀함은 없겠지만 어쨌든 지상항행시설 없이 가능한 항법이다. 점점 GPS와 항법 기술이 발달하니 요즘엔 RNAV로 많이 대체되고 있다. 그러니 순수한 의미의 GPS 접근 절차를 볼 기회가 없다. 미국에나 좀 남아있다고 한다.
- 이 절차를 이용하려면 해당 공항에 GPS 절차 외 다른 접근 절차가 백업으로 있어야한다.